步進馬達的類比編碼回饋(Analog Feedback)
硬體: Motion Control>>Controllers>>PCI-7350, Motion Control>>Controllers>>PCI-7330, Motion Control>>Controllers>>PCI-7332, Motion Control>>Controllers>>PCI-7334, Motion Control>>Controllers>>PCI-7340, Motion Control>>Controllers>>PCI-7342, Motion Control>>Controllers>>PCI-7344, Motion Control>>Controllers>>PCI-7352, Motion Control>>Controllers>>PCI-7354, Motion Control>>Controllers>>PCI-7356, Motion Control>>Controllers>>PCI-7358, Motion Control>>Controllers>>PCI-7350, Motion Control>>Controllers>>PCI-7304, Motion Control>>Controllers>>PCI-7314, Motion Control>>Controllers>>PCI-7324, Motion Control>>Controllers>>PCI-7330, Motion Control>>Controllers>>PCI-7332, Motion Control>>Controllers>>PCI-7334, Motion Control>>Controllers>>PCI-7340, Motion Control>>Controllers>>PCI-7342, Motion Control>>Controllers>>PCI-7344, Motion Control>>Controllers>>PCI-7352, Motion Control>>Controllers>>PCI-7354, Motion Control>>Controllers>>PCI-7356, Motion Control>>Controllers>>PCI-7358
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||
問題:
我想使用類比編碼回饋步進馬達,請問我該怎麼做?
解答:
基本上設定步進馬達的類比編碼回饋是跟設定伺服馬達一樣的。正確來說,就算您不使用編碼回饋,您仍需要定義在沒有使用編碼回饋時每圈幾個count。
接下來的四個步驟將解釋如何設定步進馬達使用類比編碼回饋
- 連接類比編碼回饋訊號線至你所使用的軸上的analog input。請參考運動控制卡的使用說明書或您的Universal motion interface (UMI)使用手冊已得知正確接腳。
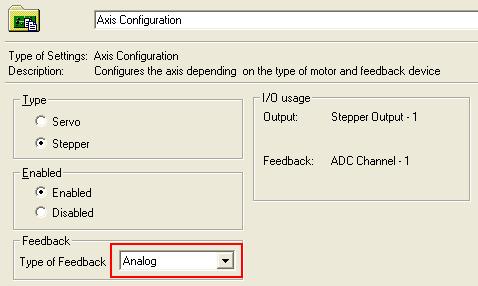
- 在MAX中的Axis Configuration (請選擇連接步進馬達的軸),將primary feedback設定成Analog
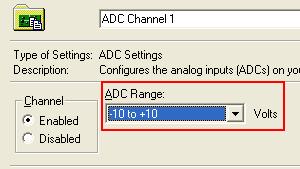
- 在MAX裡的"ADC Settings"中,選擇適合您類比編碼回饋感測器的電壓範圍。
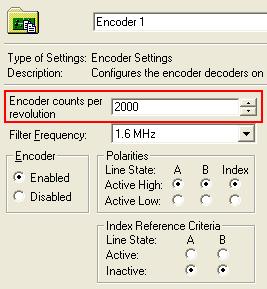
- Goto "Encoder Settings" 並改變編碼器的coumt per revolution的設定以符合您所使用的步進馬達上ADC的步數。
相關連結:
Product Manuals: National Instruments 7330 User Manual
Product Manuals: National Instruments 7340 User Manual
Product Manuals: NI 7350 User Manual
Product Pages: Universal Motion Interfaces
附加檔案:
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||
報告日期: 03/23/2006
最後更新: 05/10/2006
文件偏號: 3VMMB7AJ