基于NI EVS-1464 与 PXI System的产线皮带中心位置偏移检测
主要软件: Driver Software>>NI-IMAQ for IEEE-1394
主要软件版本: 2.1
主要软件修正版本: N/A
次要软件: Driver Software>>NI-DAQmx
硬件: Image Acquisition (IMAQ)
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||
问题:
产线上经常需要对产品的优劣做出高效率的判断,然后对不满足要求的产品做出调整。这里有一家生产条纹带子的厂家。 产线带子会由机械带着水平移动,比如每次平移150mm,镜头对准红色框出的“有纹路”和“无纹路”的交界点(附近),见图1。
如果以镜头中心为带子交界点的理想位置,但事实上总会有一些水平位置的偏差。
客户需求:图像采集系统可以在10ms以内准确的识别出产线上带子的偏移量;进一步,在可能的情况下,输出一个模拟控制信号用来控制调整带子位置恢复到镜头中心点,而识别出带子偏移量加上输出模拟信号的时间总和控制在10ms以内。 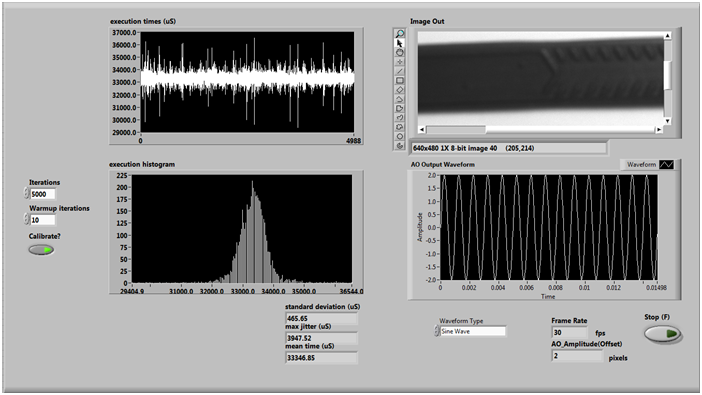
图1. 待测样本
解答:
IEEE 1394 (firewire) camera (Basler scA1600-14fm)
 图7. 运行消耗时间标定
图7. 运行消耗时间标定 |
EVS-1464(5000,Mean Time) |
Collect Data and Dispose(ms) |
Collect Data(ms) |
|
640×480 30fps |
33.83453 |
33.3465 |
|
800×600 15fps |
66.68049 |
66.66596 |
|
1024×768 15fps |
66.66751 |
66.66686 |
|
1280×960 15fps |
66.66843 |
66.66757 |
|
1600×1200 7.5fps |
133.33627 |
133.33062 |
|
1626×1236 14fps(test) |
71.62509 |
71.62465 |
|
EVS-1464(5000,Mean Time) |
Collect Data and Dispose(ms) |
Collect Data(ms) |
|
640×480 30fps |
33.83453 |
33.3465 |
|
640×480 15fps |
66.66674 |
66.6656 |
|
640×480 7.5fps |
133.33432 |
133.33385 |
|
640×480 3.75fps |
266.66823 |
266.66735 |
|
640×480 1.88fps |
533.33509 |
533.33401 |
表3. PXI_Vision在帧速为30fps下处理5000次取平均时间
PXI_Vision_AO(5000,Mean Time)
Collect Data and Dispose(ms)
Collect Data(ms)
640×480 30fps
33.34685
33.3346
相关链接:
附件:
![]() Vision_Test Belt+AO_HaixiangBao.zip
Vision_Test Belt+AO_HaixiangBao.zip
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||
报告日期: 05/27/2012
最近更新: 06/27/2012
文档编号: 5XQKEOSN