NI-Motion控制器該如何設定Encoder Index的參考值(Index Reference Criteria)?
硬體: Compact FieldPoint>>Controllers
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||
問題: 我該如何正確的設定編碼器index的參考值?為何我需要設定這些東西呢?
解答: Index參考設定值(Index Reference Criteria)可以在MAX(Measurement & Automation Explorer)內的NI Motion Devices»PCI-73xx»Axis x»Encoder Settings找到,其中PCI-73xx代表您的馬達控制器裝置,Axis x表示您正在設定的軸。
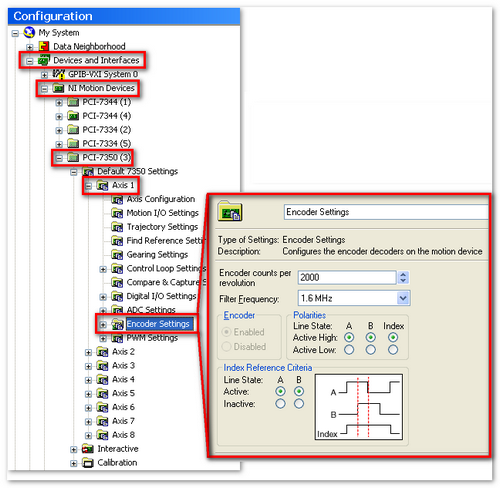
在Index參考值設定頁面下,有選項可以active A和B的編碼器狀態。這個index參考值定義了當index active發生時,編碼器A和B的相位狀態需求。如圖:

A AND B AND Index
如果A和B同時狀態被active,並且index active,這個邏輯決定了index參考值。
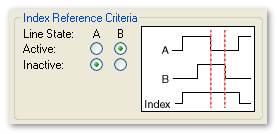
NOT A AND B AND Index
如果A inactive同時B active,並且index active,這個邏輯決定了index參考值。
透過設定index參考值,如果index脈衝跨越多個正交編碼器狀態,您可以確保您的系統更加精準。正交編碼器狀態被定義為四種A和B狀態的組合:
透過設定index參考值,如果index脈衝跨越多個正交編碼器狀態,您可以確保您的系統更加精準。正交編碼器狀態被定義為四種A和B狀態的組合:
- A & B active
- A active, B inactive
- A inactive, B active
- A & B inactive
Index脈衝跨越多個正交編碼器狀態就如同以上截圖所示。在這種特殊的情況下,如果沒有定義index參考值,實際得到的index寬度會是設定後的4倍。更多詳細資訊,請參考NI-Motion help。
相關連結: KnowledgeBase 39BJBEQX: Finding a Linear Encoder's Index Value with a Linear Actuator
KnowledgeBase 3VMMB7AJ: Analog Feedback with a Stepper Motor
附加檔案:
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||
報告日期: 09/23/2008
最後更新: 03/05/2015
文件偏號: 4PMGA7QE