双反馈信息和配置
主要软件:
主要软件版本: 4.5
主要软件修正版本: N/A
次要软件: N/A
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||
问题: 什么是双反馈并且何时如何使用双反馈?
解答:
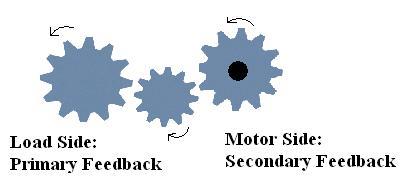
运动控制系统经常使用传动来增加力矩,分辨力,或者将旋转运动转换为线性运动。使用传动可能会将后冲引入到系统中。后冲在负载和电机运动存在延迟时会发生,导致位置精度和系统稳定性的降低。
对于一个运动轴使用两个位置传感器,或者说编码器可以有助于解决后冲问题。传动前,将一个传感器放在负载端,另一个放在电机端。在负载端的传感器作为主反馈用作速度回馈,如果将负载端的编码器反馈用作速度回馈,系统后冲会导致正确速度的延迟响应。电机端可用于校正这个问题,并被用作次反馈。
- 在测量和自动化浏览器(MAX)中,在轴配置选板下,设置您的反馈类型为双反馈编码器
*注意: 系统中不能使用模拟反馈 - 默认情况下,使用编码器1和编码器3
- 将主(负载)传感器连接到编码器1
- 将次(电机)传感器连接到编码器3
- 在MAX的控制环路设置选板下,设置差分增益(Kd)为0。您将使用的是速度增益(Kv)。
- 像在其它系统中一样设计您的运动轨迹
相关链接: NI-Motion User Manual
附件:
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||
报告日期: 02/08/2007
最近更新: 06/28/2010
文档编号: 467JO44M